










 Portuguese (pdf)
Portuguese (pdf)
 Article in xml format
Article in xml format
 Send this article by e-mail
Send this article by e-mail
 Permalink
Permalink
Introdução
O discurso em defesa de um ensino contextualizado e que tenha o aluno como sujeito ativo permeia tanto a Educação Básica quanto o Ensino Superior. Mas, a experiência docente, em ambas as modalidades, nos fez enxergar que há ainda uma centralidade no professor como detentor do conhecimento, ficando desvalorizados os conhecimentos prévios dos alunos. No Ensino Superior percebemos que os universitários estão, na maior parte do tempo, apenas ouvindo e memorizando técnicas, modelos, fórmulas e soluções prontas, não levando em consideração problemas reais do contexto. Mais especificamente, num curso de Engenharia Civil, observamos uma tendência em formar engenheiros projetistas e/ou executores de obras de forma mecânica e baseada apenas na reprodução de ações, com ausência de problematização e liberdade de aprendizagem.
Partindo desta situação e dos textos de Piaget, Freire e outros autores, realizamos a discussão dos vários significados de colaboração e cooperação, que nos levou à proposição da colaboração educativa e cooperação educativa. A proposta de ensino com base na colaboração educativa busca ser contextualizada e estabelecer uma autoridade compartilhada entre alunos e professor para a construção coletiva de conhecimento. Combinamos essa proposta com a robótica pedagógica em um curso de Engenharia Civil, cujo objetivo foi o de observar, descrever e analisar um grupo de universitários e um professor que partiu da premissa de discutir, planejar e confeccionar um robô que pudesse identificar e/ou resolver problemas envolvendo processos químicos em construções civis. Segundo Garcia e Soares (2018), a robótica pedagógica é uma tecnologia educacional que auxilia o professor em sua prática, podendo expandir o ambiente de aprendizagem e permitir integração de diversas disciplinas. Assim, buscamos responder à pergunta: como a colaboração educativa combinada com a robótica pedagógica contribui para a aprendizagem dos sujeitos?
Colaboração, cooperação e aprendizagem colaborativa
Segundo Panitz (1999, p. 3, tradução nossa), colaboração é "[...] uma filosofia de interação e estilo de vida pessoal onde os indivíduos são responsáveis por suas ações, incluindo aprender e respeitar as habilidades e contribuições de seus pares". O autor defende que há autoridade e responsabilidade compartilhadas, sem que um indivíduo em específico direcione as ações do grupo. O ato de colaborar consiste, então, no alcance de consensos, no trabalho comum e no compartilhamento, tendo a autoridade deslocada do professor para o aluno. A cooperação consiste "[...] na estrutura de interação projetada para facilitar a realização de um produto final ou objetivo específico por meio de pessoas trabalhando juntas em grupos" (PANITZ, 1999, p. 3, tradução nossa). Esse processo é diretivo, pois o professor direciona as atividades a serem realizadas pelos alunos em sala de aula. Nessa perspectiva, enquanto a colaboração é um estilo de vida mais ligada aos aspectos afetivos e de convivência, a cooperação se traduz numa estrutura específica com divisão de tarefas para o alcance de um produto final. Para o autor, a colaboração é mais centrada no aluno e a cooperação mais centrada no professor.
Silva (2011) defende que a aprendizagem baseada na colaboração é um tipo de interação social em que há compartilhamento de conhecimento e envolvimento de todos na construção de novos conhecimentos, sendo o processo centrado no aluno. Este último é quem controla e constrói o conhecimento em conjunto com os demais, além de ter responsabilidade sobre sua própria aprendizagem e a de seus colegas. Corroborando com tal definição, Garcia e Soares (2018) entendem colaboração como trabalho em conjunto em que os participantes possuem tarefas e auxiliam uns aos outros na realização destas, sem que haja uma hierarquia entre os sujeitos. As definições de Silva (2011) e de Garcia e Soares (2018) para cooperação são semelhantes. Os autores a definem como um trabalho que busca o alcance de um produto final por meio da divisão de tarefas, conforme as especificidades dos sujeitos que compõem o grupo. Temos agora o professor no centro, que designa as tarefas de cada um e caracteriza a aprendizagem dos alunos com base na reunião das partes que compõem o produto final. Nesse caso, o conhecimento é construído de forma compartimentalizada.
Piaget (1973) menciona colaboração, coação e cooperação ao correlacionar os fatores individuais e sociais para explicar o desenvolvimento humano. Há dois pontos de vista a serem considerados nessa correlação: diacrônico ou causal e sincrônico ou de equilíbrio. O primeiro refere-se ao desenvolvimento como uma evolução em etapas contínuas, enquanto o segundo o aborda a partir do equilíbrio entre fatores interdependentes. O autor realiza a síntese desses dois pontos de vista, demonstrando que no início do desenvolvimento humano o individual sobressai o social (o primeiro é a causa do segundo) e que a partir de certos estágios forma-se um equilíbrio e uma relação de interdependência entre ambos. O estágio inicial da vida, o sensório-motor, é puramente individual, interessando-se pouco pelo aspecto da socialização, pois o indivíduo apresenta uma inteligência prática decorrente de seus esquemas básicos, que são reflexos do organismo com base em instintos. No pré-operatório, a socialização é mais significativa e caracterizada por um egocentrismo. A linguagem começa a ser desenvolvida, mas não sendo compreendida em sua complexidade de sinais de uma só vez, e por isso o sujeito completa a compreensão com símbolos próprios de um jogo de imaginação. No estágio operacional, a socialização é mais explícita, e o indivíduo consegue realizar ações reversíveis (operações), conservar objetos e coordenar pontos de vista com outros sujeitos, partindo do concreto para o abstrato.
A interpendência entre o individual e o social começa a se despontar no pré-operatório, quando os esquemas egocêntricos ainda são transformados de forma superficial pelas coações exercidas por pessoas mais velhas. A coação consiste numa relação "[...] que implica uma autoridade e uma submissão, conduzindo assim à heteronomia" (PIAGET, 1973, p. 168). Ela é a base para a solidariedade externa, em que "[...] os indivíduos são solidários uns com os outros porque obedecem juntos a uma regra externa, que é absoluta e intangível. A unidade do grupo baseia-se, assim, na mesma obediência, e não na decisão comum que resulta do desejo de conviver e cooperar" (PIAGET, 1931, p. 13, tradução nossa). Essa solidariedade externa não consiste no verdadeiro ato solidário, visto que não há coordenação intelectual entre os sujeitos. O que há em comum é o respeito unilateral característico da coação moral, ou seja, o ato solidário é a obediência conjunta das crianças às regras externas dos adultos. Essas regras não são elaboradas pelas crianças, por isso permanecem estranhas à sua personalidade, e o compromisso dos indivíduos estará em parte completado por um jogo de fantasia e, por outro lado, pela observância às leis. Isso acontece porque os esquemas egocêntricos ainda são insuficientes para modificar as regras externas e libertar os sujeitos das coações (PIAGET, 1931). Há ainda um desequilíbrio entre os fatores individuais e sociais.
No estágio operacional o equilíbrio entre o individual e o social é mais evidente. Ao passo que o indivíduo desenvolve operações individuais, consegue também cooperar. Cooperar é operar em conjunto, e consiste no ajustamento das operações individuais dos sujeitos por meio de novas operações de correspondência e/ou reciprocidade. É uma relação interindividual que "implica igualdade de direito ou autonomia, assim como a reciprocidade entre personalidades diferenciadas" (PIAGET, 1973, p. 168). Podemos afirmar que a cooperação é uma interação social que culmina em desenvolvimento individual e as operações individuais, ao serem agrupadas, culminam em cooperação. Isso consiste num equilíbrio final móvel e reversível. Segundo Piaget (1931), a cooperação ainda conduz à solidariedade interna, que caracteriza o verdadeiro ato solidário, em que há respeito mútuo entre os indivíduos para criarem, seguirem e revisarem as regras internas do próprio grupo. Há tanto coordenação intelectual quanto moral, que visa estabelecer consensos para uma obediência recíproca e garantia do espírito democrático. Diferentemente da coação, em que as regras são externas, na cooperação as regras resultam do próprio ato de cooperar.
O termo colaboração aparece na obra de Piaget (1973) sem uma definição precisa. Mas podemos deduzir o sentido atribuído pelo autor a partir de alguns trechos:
[...] toda conduta executada em comum se traduz necessariamente pela constituição de normas, de valores ou de significantes convencionais. E há assim condutas de luta ou opressão, como diversas formas de colaboração, porque mesmo em toda guerra ou em luta de classes, defendem-se certos valores, evocam-se certas regras e utilizam-se determinados símbolos [...]; a razão não é senão comunicação, discurso e conjunto de conceitos; ela é primeiramente sistema de operações e é na colaboração na ação que conduz à generalização operatória [...]; O estudo do desenvolvimento da razão mostra uma estreita correlação entre a constituição das operações lógicas e de certas formas de colaboração [...]; é a estruturação lógica ou pré-lógica de um nível que determina o modo de colaboração em jogo ou a estrutura das relações coletivas que determina as operações intelectuais? (PIAGET, 1973, p. 36; 82; 95; 103).
O primeiro trecho nos remete à coação e cooperação, visto que cita as condutas executadas em comum, que se traduzem por normas e valores. E essas condutas são as diversas formas de colaboração. O segundo e terceiro trechos estabelecem uma correlação entre formas de colaboração (social) e operações lógicas (individual), o que nos permite deduzir que essas formas de colaboração não só conduzem à cooperação, como a cooperação é uma forma de colaborar. No quarto trecho, o questionamento realizado pelo autor indica que tanto a estruturação lógica ou pré-lógica tem relação com o modo de colaboração. Entendemos que o modo de colaboração pode ser por coação ou cooperação. Enquanto que a estrutura pré-lógica refere-se aos níveis sensório-motor e pré-operatório, a estrutura lógica é referente ao nível operacional. Essas interpretações são ainda corroboradas por dois exemplos apresentados pelo autor. O primeiro diz respeito aos chimpanzés, que são seres vivos em que se desponta "[...] a função simbólica e certa colaboração na ação, mas o essencial do ato de inteligência permanece sensório-motor, sem estruturação operatória, nem coletiva" (PIAGET, 1973, p. 100). Esse fragmento permite compreender que a colaboração não se restringe ao estágio operacional, mas pode envolver indivíduos com estruturas de diferentes níveis (sensório-motor, pré-operatório, operatório), ou seja, entre os chimpanzés há colaboração, mas não cooperação.
Um segundo exemplo é o da construção de uma ponte por duas pessoas sobre as duas bordas de um riacho. Cada indivíduo vai construir uma escada de pedras em forma de trampolim e depois ligarão ambas por uma prancha horizontal. Segundo o autor, essa colaboração consiste no ajustamento das ações umas às outras de forma a se corresponderem. Em seguida, ele explica que esse ajustamento se efetuará por operações qualitativas e/ou métricas (correspondência, reciprocidade, complementaridade, etc), e que "[...] se cada uma das ações dos colaboradores, sendo regulada por leis de composição reversível, constitui uma operação, o ajustamento destas ações de um colaborador a outro (isto é, sua colaboração mesmo) consiste igualmente em operações" (PIAGET, 1973, p. 104). Isso significa que cooperar é operar colaborativamente para ajustar as operações individuais umas às outras. Essa mesma noção pode ser percebida quando Piaget (1931, p. 26, tradução nossa) defende a "[...] constituição de um novo espírito de colaboração e justiça, que permita aos indivíduos cooperar independentemente de diferenças de raça e nacionalidade". Então a colaboração não só antecede a cooperação, como ambas se confundem num único processo, sendo a segunda uma continuação da primeira entre indivíduos que se encontram no estágio operacional. Ressaltamos que mesmo com ausência de estrutura operatória, há colaboração, o que fica evidente com o exemplo dos chimpanzés (colaboração com estrutura sensório-motora) e com a referência aos estágios pré-lógicos como determinantes no modo de colaborar ou vice-versa. Sugerimos, ainda, o exemplo da amamentação de um bebê que age instintivamente quando está com fome por meio do choro. A mãe, com base em suas operações e aspectos afetivos, sabe que precisa amamentar o filho. O bebê suga o leite e cessa o choro. A mãe sabe que efetuou a ação necessária. Essa colaboração se dá pela correspondência entre reflexos do bebê e operações da mãe. À medida que o bebê se desenvolve, haverá correspondência entre estruturas pré-operatória do filho e operatória da mãe. Essa correspondência é garantida pelos atos de coação, em que há respeito unilateral às regras dos adultos, que são inquestionáveis e soberanas sob o ponto de vista da criança. Dessa forma, a coação não só continua a colaboração como é uma forma específica de colaborar. Quando filho e mãe, ambos no estágio operacional, colaboram, temos então as cooperações. Em resumo, para Piaget (1973), colaborar é ajustar ações (irreversíveis ou reversíveis) entre indivíduos para que estas sejam correspondentes, complementares e/ou recíprocas, podendo os sujeitos colaboradores se encontrar em quaisquer estágios do desenvolvimento. Por isso, coação e cooperação são formas de colaboração.
Para Freire (1987) a colaboração (co-laborar; laborar = trabalhar) é entendida como o trabalho dos sujeitos em conjunto na ação dialógica para a transformação do mundo. Nesse processo os indivíduos não são meros objetos do fazer revolucionário proposto por um líder. É a humildade do líder em desfazer-se de sua posição mais elevada e comungar com os demais sujeitos, que demonstra a solidariedade para com estes e permite a colaboração no diálogo. Na educação libertadora há colaboração, que ocorre pelo deslocamento de autoridade do professor para o aluno, permite as relações horizontais, o respeito mútuo, o diálogo, a conscientização crítica e a construção conjunta. Os sujeitos envolvidos têm a mesma autoridade e liberdade para expor, dialogar, pensar, propor e aprender. Trata-se da superação da educação bancária, que se dá por relações verticais, submissão do aluno ao professor e serve ao sistema opressor de transmissão de conhecimentos e valores de forma acrítica. Essa superação da concepção bancária pela educação libertadora é análoga à superação da coação pela cooperação em Piaget (1973), assim como podemos afirmar que a cooperação é instrumento à libertação, e o professor não deve ser "[...] o que apenas educa, mas o que, enquanto educa, é educado, em diálogo com o educando que, ao ser educado, também educa" (FREIRE, 1987, p. 39). E afirmamos que a coação é instrumento à educação bancária.
A investigação temática, ou dos temas geradores, é uma metodologia baseada na educação libertadora ou problematizadora. Esse método consiste na tomada de consciência crítica da realidade em que os sujeitos se encontram, levando-os à interpretação dos problemas e compreensão do contexto (FREIRE, 1987). Ainda com base em Freire (1987) e Ricardo (2010), entendemos que: os temas geradores são recortes do contexto dos sujeitos, constituindo a fonte de diversas situações-problemas; as situações-problemas são formas estruturadas e organizadas de problemas reais, cuja solução será construída a partir dos conteúdos programáticos; os conteúdos programáticos são formas sistematizadas de conhecimentos que serão mobilizados para construção de soluções e consequentemente novos conhecimentos. Um professor juntamente com os alunos pode reduzir um tema a várias situações-problemas para serem solucionadas em grupo. Logo, a situação-problema precisa mobilizar conhecimentos (os conteúdos) para sua própria solução e compreensão do contexto. Ao invés do professor partir do conteúdo em busca de exemplos do cotidiano, alunos e professores partem juntos do contexto em busca dos conteúdos que podem melhor explica-lo e resolver a situações-problemas. A realidade é o ponto de partida e de chegada. Dela surgem os temas geradores que levam às situações-problemas e influem na escolha dos conteúdos. Essa é a problematização. Os conteúdos são utilizados para solucionar as situações-problemas e compreender o contexto. Essa é a contextualização.
Há relações entre a colaboração freireana (co-laborar = trabalhar em conjunto no diálogo), a cooperação piagetiana (cooperar = co-operar = operar em conjunto) e as definições apresentadas por Panitz (1999), Silva (2011), Garcia e Soares (2018). Com fundamento nessas relações, apresentamos a proposta de ressignificação dos termos colaboração e cooperação, que denominamos colaboração educativa e cooperação educativa, específicas para o processo educacional. A colaboração educativa é um método que busca a construção conjunta de conhecimentos, principalmente pelo diálogo entre alunos e professor, que compartilham autoridade e responsabilidade, ocupando o mesmo nível hierárquico e possuindo as mesmas tarefas ou atribuições no grupo. A cooperação educativa é um método que busca a construção de conhecimentos de forma compartimentalizada e por meio da divisão de tarefas entre os membros ou subgrupos formados por estes, tendo o professor como direcionador do processo, que divide as tarefas conforme as habilidades e os conhecimentos prévios dos alunos. O produto final é o conhecimento resultante da reunião das partes.
Devido ao amplo sentido em que Piaget (1973) utiliza o termo colaboração, englobando a própria cooperação, nossa proposta é fazer uma distinção clara entre ambos no processo educacional. Tanto a colaboração educativa como a cooperação educativa exigem que todos os sujeitos estejam no estágio operacional, se respeitem mutuamente e operem conjuntamente, para que o equilíbrio atual entre os fatores individuais e sociais seja perturbado e um novo equilíbrio possa ser constituído. O professor deve ter humildade para deslocar parte de sua autoridade aos alunos, o que nos lembra a solidariedade em Freire (1987), para assim garantir a comunhão no diálogo. Mas há uma diferença quanto ao deslocamento de autoridade entre os dois processos. Enquanto na colaboração educativa todos ocupam o mesmo nível hierárquico, na cooperação educativa, o professor está em nível um pouco mais elevado do que os alunos. Mesmo com isso, o aluno continua sendo ativo e tem autonomia para realizar as tarefas designadas. A autoridade compartilhada ocorre tendo o professor como direcionador, mas não educador bancário. Há, portanto, mais autoridade compartilhada na colaboração educativa do que na cooperação educativa.
Ainda baseado em Silva (2011), consideramos que, na colaboração educativa, o professor deverá ter uma postura assimétrica quando precisar intervir em momentos de dificuldade para ensinar e orientar os alunos e uma postura simétrica no que tange ao aspecto discursivo da relação interindividual educador-educando. Por isso, o profissional deve dosar suas interferências ao iniciar, limitar ou deixar fluir a discussão, de forma que haja o deslocamento de autoridade do professor para o aluno. Mas o educador deve sempre reconhecer a assimetria no que diz respeito ao processo educacional e como um membro preparado para intervir na retomada do equilíbrio colaborativo. Na cooperação educativa, a assimetria persiste em maior parte do tempo, já que o professor coordena todos os grupos, divide tarefas e pode apresentar mais espaço para exposição oral. Indicamos a colaboração educativa para processos em que o diálogo é a principal ferramenta de construção conjunta e a cooperação educativa para processos cujo foco é a transformação material de objetos. Ambas podem ser utilizadas em diferentes momentos do mesmo processo. Daqui em diante, nosso foco é a colaboração educativa e a aprendizagem decorrente desta.
A aprendizagem colaborativa resulta do reequilíbrio entre os fatores individuais e sociais, que é provocado pela colaboração educativa. Os fatores individuais referem-se aos sistemas de esquemas de ação de cada sujeito. E, segundo Piaget (1967, p. 24, tradução nossa), o esquema de ação consiste no que é "[...] transponível, generalizável ou diferenciável de uma situação para outra, ou seja, o que é comum às várias repetições ou aplicações da mesma ação". O ser humano nasce com esquemas sensório-motores básicos (sugar, pegar, chorar, etc), que vão se modificando e tornando-se mais complexos à medida que interage com os objetos e com outros seres humanos. Esses esquemas adquirem aspectos conceituais e objetais, coordenam-se entre si, juntam-se e formam novos esquemas (medidas, conceitos, valores, etc). Os esquemas incorporam informações dos objetos e/ou do meio, modificando-se para adaptar-se a estes. Essa incorporação de elementos do objeto ou do meio pelo sujeito é a assimilação. A modificação da estrutura cognitiva que visa constituir, coordenar ou ampliar esquemas é a acomodação. Dessa forma, a assimilação ocorre a partir de esquemas antes acomodados e a acomodação é desencadeada por elementos previamente assimilados. Esse equilíbrio entre assimilação e acomodação é a própria adaptação do sujeito ao objeto ou ao meio.
É a equilibração que compensa os desequilíbrios entre assimilação e acomodação e permite ao sujeito evoluir de um estágio de desenvolvimento a outro, levando à formação de um novo equilíbrio (reequilibração). Temos assim, que a equilibração ainda pode se apresentar em três níveis subsequentes: intra, inter e trans. Ao entrar em contato com um novo objeto, o sujeito assimila suas características básicas a partir de esquemas pré-existentes, constituindo novos esquemas, que permanecem isolados, caracterizando o nível intra. Quando esses esquemas estabelecem relações e diferenciações com outros esquemas, temos a formação de subsistemas coordenados, sendo esse o nível inter. Os subsistemas coordenados, ao estabelecerem relações e diferenciações mantendo entre eles uma hierarquia (o que não ocorria no nível inter), constitui então uma totalidade sistemática, sendo esse o nível trans. (PIAGET; GARCIA, 2011). Aguiar Junior (2004) nos fornece um modelo que permite identificar esses níveis no processo educacional. O nível intra é caracterizado pelas sensações, percepções imediatas e descrições dos elementos observáveis, sem haver uma compreensão profunda, pois são as noções intuitivas que se fazem presentes. O nível inter é caracterizado pelas relações que o indivíduo consegue estabelecer entre ações e objetos, levando-o a compreender certas regularidades existentes. O nível trans é caracterizado pelas relações que o indivíduo consegue estabelecer ao englobar ações e objetos em princípios gerais, isto é, trata-se da teorização, em que os princípios gerais apresentam um nível hierárquico mais elevado, sendo a totalidade que envolve os demais esquemas. Um indivíduo em nível trans consegue aplicar os princípios gerais a diferentes ações e objetos, mesmo que estes sejam proposições abstratas.
Para que haja aprendizagem colaborativa são necessários requisitos essenciais. Consideramos aqui os quatro requisitos de Silva (2011): conhecimentos prévios, informação compartilhada, regra assumida e construção de conhecimento. Os conhecimentos prévios são as pré-concepções e as perspectivas conceituais advindas dos esquemas individuais de cada sujeito, que constituem um ponto de partida para a colaboração. É a partir da informação compartilhada que ocorre a troca entre os indivíduos, de forma que haja conflitos entre diferentes conhecimentos prévios e destes com os conhecimentos científicos em discussão. Esse compartilhamento precisa ser sistematizado para que o objetivo seja alcançado. Por isso, para um fluxo de informações simultaneamente constante e coordenado, é necessário que haja regras assumidas, permitindo a delimitação, organização e refinamento dos conhecimentos discutidos. Mas a criação de regras depende também de trocas interindividuais. Logo, o compartilhamento sob controle das regras ou mesmo a criação de regras a partir do compartilhamento, se dá pela coordenação de operações individuais num único sistema operatório. Isso culmina na construção de conhecimento coletivo. Esse conhecimento coletivo passa a ser também novo conhecimento prévio para cada sujeito. Dessa forma, há equilíbrio entre informação compartilhada e regras assumidas e entre conhecimentos prévios individuais e conhecimentos construídos coletivamente.
Método de pesquisa
Utilizamos nesta pesquisa o método de estudo de caso, que permite investigar, analisar, e compreender casos particulares profundamente e em sua totalidade por meio da observação, descrição e interpretação (MORGADO, 2013). O grupo estudado foi constituído por sete alunos de um curso de Engenharia Civil da Faculdade de Iporá (FAI), três alunos do curso de Tecnologia em Análise e Desenvolvimento de Sistemas (TADS) do Instituto Federal Goiano e um professor de Química da Faculdade de Iporá (FAI), sendo identificados como: alunos de Engenharia Civil (A1, A2, A3, A7, A8, A9, A10), alunos de TADS (A4, A5, A6) e professor de química (PQ). É possível notar que os sujeitos desta pesquisa são oriundos de realidades e de conhecimentos diferentes. A proposta apresentada foi a de discutir, planejar e confeccionar um robô de forma colaborativa, que envolvesse conhecimentos químicos na construção civil. Realizamos 40 reuniões durante doze meses no Laboratório de Eletrônica da FAI, que foram gravadas em imagem e áudio. Salientamos que neste trabalho apresentamos as análises apenas do processo de discussão para planejamento do robô. Para realização dessas análises utilizamos a análise de conteúdo. Dessa forma, as gravações foram fielmente transcritas (regra da exaustividade), selecionadas num processo de redução do corpus documental (regra da representatividade) e submetidas à categorização, que consiste na classificação de elementos por meio de diferenciação e reagrupamento. Emergiram duas categorias de análise a partir dos discursos de alunos e professor, que denominamos Dúvidas e Sugestões. Durante as etapas realizamos inferências, que consistem na atribuição de sentido às categorias e explicações para estas (BARDIN, 2002; MORGADO, 2013). A seguir submetemos as dúvidas e sugestões ao novo método de pesquisa que estamos propondo neste artigo com base na colaboração educativa. Esse novo método foi constituído por três etapas: razão hierárquica (RH), razão categórica (RC) e análise qualitativa subcategórica (AQS). As duas primeiras etapas analisam a forma dos discursos de dúvidas e sugestões quantitativamente, com intuito de demonstrar se houve condições adequadas para colaboração educativa. A terceira etapa analisa o conteúdo dos discursos qualitativamente, com intuito de demonstrar se houve aprendizagem colaborativa.
Resultados e discussões
Definimos as duas categorias identificadas da seguinte forma: dúvidas são discursos representados por perguntas e/ou incertezas e desconhecimento; sugestões são discursos representados por frases afirmativas e conhecimento, expressas por propostas convictas e/ou esclarecimentos às dúvidas. Tais características podem ser identificadas nos exemplos abaixo:
A7 – Mas então o ultrassom é tipo um laser? [dúvida]
A3 – Ou então podemos fazer um sistema hidráulico com peças mais leves. E aí podemos usar os motores para acionar esse sistema e subir e descer a cabeça. [sugestão]
Em seguida apresentaremos as análises nas três etapas propostas em sequência: (1) Razão hierárquica (RH); (2) Razão categórica (RC); (3) Análise qualitativa subcategórica (AQS).
1ª etapa ➔ Razão hierárquica (RH)
Inicialmente, contabilizamos a quantidade de discursos de dúvidas e de sugestões dos alunos e do professor. Depois os números foram convertidos em porcentagem e apresentados no gráfico da figura 1. O somatório de dúvidas e sugestões dos alunos foi de 52% (10%+42%), enquanto o somatório de dúvidas e sugestões do professor foi de 48% (3%+45%). Uma relação horizontal ideal e equilibrada, assim como a autoridade e responsabilidade compartilhadas e o respeito mútuo, conforme elementos de Panitz (1999), Garcia e Soares (2018), Silva (2011), Piaget (1973) e Freire (1987), é aquela em que há 50% de participação tanto para alunos quanto para professor. Embora o professor assuma momentaneamente um papel de mesmo nível hierárquico dos alunos, trata-se de um indivíduo com atribuições muito diferentes destes últimos no processo educacional. Por isso o equilíbrio não se dá dividindo a autoridade em partes iguais pelo número de participantes, mas sim com uma divisão em duas partes, sendo uma para cada grupo de integrantes com as mesmas atribuições. Dessa forma, naquele momento de atividade colaborativa, o professor é um integrante participativo assim como seus alunos (simetria), mas não deixa de exercer seu papel de profissional (assimetria).
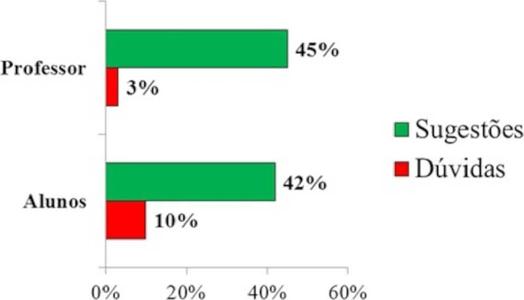
Com os resultados que obtivemos acima, consideramos ter tido um compartilhamento de autoridade muito positivo. Para avaliar a autoridade compartilhada criamos o indicador numérico da razão hierárquica (RH), que consiste na razão entre o percentual de dúvidas e sugestões dos alunos e o percentual de dúvidas e sugestões do professor. Obtivemos a seguinte RH a partir dos dados extraídos do gráfico da figura 1:
Com uma RH = 1,08 a aprendizagem colaborativa ocorreu (como mostraremos na etapa 3), pois estávamos próximos ao valor ideal, que é uma RH = 1. O protagonismo exacerbado dos alunos pode levar à fuga do diálogo central e perda da formalidade do processo, assim como o protagonismo exacerbado do professor pode gerar uma opressão sobre os alunos, inibindo-os. Quanto mais distante da RH = 1, menos autoridade compartilhada haverá e maior será o desequilíbrio. Assim sendo, a relação hierárquica (RH) pode ser classificada como:
2ª etapa ➔ Razão categórica (RC)
Durante as discussões em grupo esperávamos, hipoteticamente, que haveria 75% de dúvidas e 25% de sugestões. Primeiramente pela robótica não ser um tema ensinado no curso de Engenharia Civil e, depois, por acreditar que os alunos se sentiriam inibidos em sugerir. Realizamos a plotagem de uma pirâmide para expressar graficamente a razão esperada entre dúvidas e sugestões. Essa pirâmide é mostrada na figura 2 à esquerda, apresentando um tronco (área das dúvidas) e um pico (área das sugestões). As dúvidas representam 75% da área e as sugestões representam 25%, de forma que haja um encaixe perfeito entre ambos. Quando tentamos realizar a plotagem com os dados do gráfico da figura 1, seguindo as mesmas regras da pirâmide, obtivemos um pinheiro, assim como mostrado na figura 2 à direita. No pinheiro, 13% (soma= 3% professor + 10% alunos) foram de dúvidas e 87% (soma= 45% professor + 42% alunos) de sugestões, sendo proporcionais às áreas da figura 2.
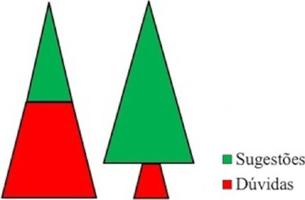
Comparando a pirâmide hipotética com o pinheiro obtido, realizamos algumas inferências fundamentadas em Silva (2011). Nas discussões em grupo os conhecimentos prévios foram mais rapidamente compartilhados, não sobrando muito espaços para dúvidas. O excesso de sugestões fez com que houvesse mais conflitos e mais regras assumidas (focar num objetivo, delimitar funções para o robô, excluir possibilidades inviáveis, etc.) com o intuito de construir um conhecimento satisfatório para confecção do robô. Denominamos isso como lógica do pinheiro, pois mais conhecimento prévio e mais informação compartilhada, exigem mais regras assumidas e resulta em condições mais propícias para construção de conhecimento satisfatório, isso em razão da quantidade de sugestões ser igual ou superior às dúvidas. Se ocorresse o inverso, menos conhecimentos prévios e menos informações compartilhadas, seriam exigidas menos regras assumidas, criando condições menos propícias para construção de conhecimento satisfatório, isso em razão da quantidade de dúvidas ser superior às sugestões. Denominamos essa concepção como lógica da pirâmide. A razão categórica (RC) verifica se houve condições para construção de conhecimento satisfatório em prol da solução de situações-problemas de determinado contexto. Ela consiste na razão entre o percentual de sugestões e de dúvidas. Com 13% de dúvidas e 87% de sugestões, a RC = 87/13 ≈ 6,7. Podemos, então, classificar as lógicas da pirâmide e do pinheiro da seguinte forma:
Pirâmide ➔ RC < 1 ➔ Menos propícia a conhecimento satisfatório
Pirâmide ➔ RC ≤ 1 ➔ Mais propícia a conhecimento satisfatório
A RC = 1 tende a lógica do pinheiro porque há equilíbrio entre a quantidade de dúvidas e sugestões, o que nos leva a entender que uma RC > 1 caracteriza um desequilíbrio. Por outro lado, a RC > 1 compensa outros desequilíbrios (entre conhecimento prévio e conhecimento construído e entre informação compartilhada e regra assumida). Poucas sugestões transformam apenas superficialmente os esquemas operatórios individuais, enquanto que mais sugestões levam a um conhecimento robusto, satisfatório e colaborativo. As proposições que demonstram conhecimento satisfatório precisam ser afirmações convictas, pois se as dúvidas sobressaírem há o risco de induzirem a mais dúvidas sem respostas satisfatórias.
3ª etapa ➔ Análise qualitativa subcategórica (AQS)
Analisaremos agora o conteúdo das dúvidas e sugestões, que demonstrará se houve aprendizagem colaborativa. Para isso, precisamos definir os três elementos indispensáveis da colaboração educativa: sujeito colaborador, objeto colaborado e ambiente aplicacional. O sujeito colaborador é o indivíduo que em conjunto com os demais discute, planeja e/ou age sobre objetos em determinado contexto para a construção de conhecimento. Os dez alunos e o professor foram os sujeitos colaboradores. O objeto colaborado é aquele sobre o qual há discussão, planejamento e/ou ação. O robô foi o objeto colaborado. O ambiente aplicacional é o contexto de onde os sujeitos colaboradores partem para discutir, planejar e/ou agir sobre objetos (problematização) e construir conhecimentos que serão aplicados nesse mesmo contexto (contextualização). A construção civil foi o ambiente aplicacional. A partir desse ambiente os estudantes de engenharia realizaram um recorte específico sobre os maiores problemas das construções civis de Iporá (tema gerador). Foram identificadas obras paralisadas com as estruturas metálicas de vigas e colunas de concreto expostos às intempéries, levando à oxidação e corrosão, que não sendo corrigidas, podem gerar graves problemas futuros e comprometer todo o prédio (situação-problema). A solução proposta pelo grupo foi o planejamento e confecção de um protótipo capaz de identificar processos de corrosão eletroquímica nas estruturas de concreto de construções civis para saber o nível de comprometimento da obra. Os alunos engenheiros acreditavam que um robô móvel facilitaria muito um processo rápido de identificação dos problemas. Toda a discussão sobre o problema e sua respectiva solução se deu por meio de dúvidas e sugestões. As dúvidas foram divididas em duas subcategorias: dúvidas de déficit global (DDG) e dúvidas de déficit parcial (DDP). As sugestões foram divididas em três subcategorias: sugestões aplicacionais-contextuais (SAC), sugestões estruturais-objetais (SEO) e sugestões integrais-funcionais (SIF).
Dúvidas de déficit global (DDG): são dúvidas que expressam desconhecimento total ou quase total do objeto colaborado e/ou do ambiente aplicacional e/ou de elementos (outros objetos) que os constituem.
A4 – E como o ultrassom será captado?
A7 – Mas então o ultrassom é tipo um laser?
A4 – Mas nesse caso o concreto pode interferir na passagem do ultrassom até o metal, né?
A7 – E nesse caso a espessura do concreto também interfere?
Essas dúvidas surgiram durante a discussão sobre detecção das estruturas metálicas de vigas e colunas. Para esclarecê-las, o professor abordou conceito de ondas e suas propriedades, adentrando a ideia de ultrassom. Utilizou as noções de som e eco para explicar que o ultrassom é uma onda sonora com frequência acima do som audível. Além disso, colocou o sensor ultrassônico em funcionamento para que os sujeitos pudessem realizar testes de medidas no espaço. Esse nível de esclarecimento foi necessário para sanar o desconhecimento total sobre o sensor ultrassônico e o conceito de ultrassom. Tanto A7 quanto A4 possuíam esquemas insuficientes, por isso conseguiram apenas assimilar características do objeto sem uma compreensão mais profunda. Embora tenham ouvido falar em ultrassom, reconheceram poucos elementos que caracterizam a onda sonora. Com base em Piaget e Garcia (2011) e Aguiar Junior (2004), acreditamos que essas dúvidas ocorreram porque os sujeitos se encontravam em nível intra de equilibração, pois suas convicções eram intuitivas e focadas em descrições pouco precisas sobre o funcionamento do dispositivo. A correlação errônea de A7, de que "ultrassom é um tipo de laser", é uma evidência da insuficiência dos esquemas pré-existentes. Isso mostra a importância dos conceitos prévios errôneos dos alunos para o ato de colaboração. Com base em Freire (1987), a atitude de humildade do professor e a formação de laços afetivos entre os sujeitos foi estímulo para que houvesse segurança por parte dos alunos para dialogarem e expor dúvidas que expressassem desconhecimento total. E o professor mostrou-se solidário perante a esse déficit, ensinando os sujeitos por meio de uma linguagem acessível e fornecendo-lhes elementos para assimilação e consequentemente acomodação. Com base em Piaget (1973), essas dúvidas não só foram desencadeadas pelo desequilíbrio cognitivo dos alunos como criaram condições para novos atos solidários. E foi o ambiente solidário inicial que desencadeou o desequilíbrio citado.
Dúvidas de déficit parcial (DDP): são dúvidas que expressam desconhecimento parcial do objeto colaborado e/ou do ambiente aplicacional e/ou de elementos (outros objetos) que os constituem.
A4 – E esse robô tem mais um detalhe, porque para ele furar, tem que tapar, e para tapar tem que levar junto com ele a pasta, o que é mais um peso. E como vamos colocar essa pasta no buraco?
A10 – Mas pensando na questão para testar a furadeira, precisaria de uma força muito grande. Será que esses motores que vocês estão falando seriam capazes?
PQ – E tem ainda o outro fator, que é a exposição da armadura metálica. Como vamos perfurar e chegar até o aço, ela ficará exposto um tempo. Será que existe algum risco de corrosão?
A1– Será que tem jeito de detectar essa armadura por indução magnética do metal?
Essas dúvidas surgiram durante a discussão sobre detecção das estruturas metálicas de vigas e colunas. Os quatro sujeitos acima apresentaram conhecimentos parciais sobre objetos presentes na discussão, sendo eles: robô (A4), furadeira (A10), armadura metálica (A1 e PQ) e estrutura de concreto (todos). A4 sabia que a função do robô de tapar o buraco seria influenciada pelo peso do objeto; A10 conhecia bem uma furadeira e tinha noção que era necessária uma força muito grande para perfuração do concreto; O professor dominava os conceitos sobre corrosão eletroquímica, mas queria saber se a exposição do metal durante um tempo curto poderia interferir na qualidade da estrutura; A1 apresentou uma hipótese de que a indução magnética poderia ser utilizada para avaliação da estrutura de concreto, porém não tinha total certeza. Vemos assim que todos esses indivíduos tinham um pouco de certeza e um pouco de dúvida quanto ao que perguntavam. Suas noções e dúvidas eram parciais e mais elaboradas do que as DDG. Isso significa que havia coordenação entre esquemas em formação, permitindo aos indivíduos identificar certas regularidades e suposições em busca de princípios mais gerais, o que nos leva a afirmar com base em Piaget e Garcia (2011) e Aguiar Junior (2004), que os sujeitos acima encontravam-se em nível inter de equilibração.
Os sujeitos A2, A7 e o professor esclareceram a dúvida de A4 ao afirmarem que dava para injetar a pasta com uma seringa acionada por um motor, mas levando o peso em consideração e a necessidade de um mecanismo de sobe e desce. O professor esclareceu a dúvida de A10 ao afirmar que é preciso motores de alta voltagem e boa base de apoio para o processo de perfuração. O sujeito A9 respondeu a dúvida do professor ao dizer que a pasta para tapar o buraco restabelece a resistência do concreto mesmo com o curto tempo de exposição, sem prejuízos à estrutura. O professor e A4 confirmaram a A1 sobre a eficácia da indução, ressaltando que é necessário um sensor para induzir o campo magnético. Todos esses esclarecimentos requisitaram vários conhecimentos (concreto, circuitos elétricos, corrosão eletroquímica e eletromagnetismo) compartilhados a partir de trocas solidárias entre alunos e destes com o professor. Esse compartilhamento foi tanto estímulo quanto resultado de assimilações e acomodações. Com base em Piaget (1973) e Freire (1987), o respeito mútuo e a liberdade para o professor ensinar aluno e vice-versa, mostraram uma relação horizontal capaz de modificar esquemas operatórios, assim como os esquemas iniciais deram condições para atos de solidariedade e consequente colaboração. Isso cria no grupo um consenso a partir de operações em comum, principalmente quando as sugestões satisfazem as dúvidas apresentadas, o que provavelmente levou os sujeitos à acomodação dos conceitos em questão.
Sugestões aplicacionais-contextuais (SAC): são sugestões que expressam prioritariamente conhecimento do ambiente aplicacional e de elementos que o constitui. Elas surgiram a partir da discussão sobre construções civis em estado de deterioração na cidade de Iporá e a dificuldade de identificar se essas construções ainda poderiam ser reaproveitadas. Os três sujeitos que seguem expressam conhecimento de elementos da construção civil. Eles conhecem bem o contexto e os principais problemas das estruturas de concreto armado, como os processos químicos envolvidos; são, portanto, sugestões que não tiveram como foco a estrutura robótica e funções do robô, mas sim conhecimentos advindos do contexto de Engenharia Civil.
A9 – Quando ocorre a cura do concreto, cria-se um mínimo espaçamento entre este e a estrutura metálica, mas um espaçamento mínimo, bem pequeno mesmo. Mas mesmo assim a armadura continua protegida. Agora se acontece de uma parte da armadura estar exposta, inicia-se um processo de oxidação e corrosão que pode afetar toda a estrutura, e aí nesse processo o diâmetro da armadura pode aumentar, devido à formação da ferrugem. E por isso acredito que é possível identificarmos que a armadura está boa ou não pelo seu diâmetro, se está maior que o original.
A7 – Igual nesse caso, geralmente começam colunas e não terminam. Aí uma parte da estrutura metálica fica exposta e depois vem e continuam a obra com essa estrutura já oxidada, sendo que pode já estar ocorrendo um processo de corrosão dentro da parte pronta.
A1 – Nesse caso, geralmente é necessário que se coloque uma camadinha de concreto até as pontas da ferragem, ficarem escondidas, para proteger da exposição ao oxigênio.
Sugestões estruturais-objetais (SEO): são sugestões que expressam prioritariamente conhecimento sobre elementos que constituem a estrutura (conceitual e/ou física) do objeto colaborado. No caso do robô, sua estrutura apresentou duas partes: física (carcaça, mecanismos e circuitos) e virtual (software). Foram abordadas nessas sugestões: a mobilidade horizontal (se seria com rodas ou esteira); a mobilidade vertical, isto é, o movimento da cabeça; a montagem dos circuitos elétricos e a criação de um software único com todos os comandos para o robô. Os alunos da Engenharia expuseram mais conhecimentos sobre a estrutura física, enquanto que os alunos de TADS expuseram mais conhecimentos sobre a estrutura virtual.
A2 – Mas ao invés de usarmos correntes e o pistão, podemos pensar em fazer com motores mesmo, sem ser hidráulico. Podemos fazer assim, precisamos de 3 m de altura, podemos arrumar 3 canos PCV de 1 m cada, e com diâmetros diferentes, de forma que um encaixe dentro do outro. Aí cada cano tendo uma correia dentada, podemos colocar um motor com engrenagem entre os canos e, quando ligar um sobe primeiro, aí depois liga outro motor e sobe o outro cano.
A3 – Ou então podemos fazer um sistema hidráulico com peças mais leves. E aí podemos usar os motores para acionar esse sistema e subir e descer a cabeça.
A4 – Tem que estudar essa biblioteca, porque provavelmente a biblioteca que usa para o Arduíno é própria dele. Não é o C++ comum que a gente usa, deve ter uma linguagem específica para cada situação. Tem que estudar esse caso.
A6 – Mas acredito que teremos que converter tudo para Java, porque na linguagem C não é possível fazer tudo isso. E ainda teremos que ver se o Arduíno aceita essa linguagem.
Sugestões integrais-funcionais (SIF): são sugestões que expressam conhecimento sobre as funções do objeto colaborado no ambiente aplicacional através da integração equilibrada de elementos de ambos. As SIF envolvem elementos das SAC e das SEO. Nelas os sujeitos estavam preocupados com as funções do robô em sua interação com a construção civil. Vemos nos fragmentos abaixo a menção ao robô, que vai perfurar o concreto e realizar medições por meio de sensores. São funções que exigem coerência de quem vai agir (robô) com quem vai receber a ação (construção civil). Nos três tipos de sugestões (SAC, SEO e SIF) os sujeitos apresentaram domínio de princípios gerais, isto é, conceitos teóricos amplos que englobam os elementos das discussões realizadas.
PQ – Nesse caso vamos fazer um robô com 4 funções principais: perfurar, identificar a armadura metálica, medir ddp e pH. Seria interessante ele identificar primeiro onde está a armadura metálica para depois começar a perfurar. Porque tem várias espessuras de concreto, e nesse caso precisa saber inicialmente a localização correta da armadura.
A5 – Aí nesse caso a gente precisa saber a espessura do concreto para fazer essa perfuração, e no comando que o computador vai dar, já precisa está especificada a espessura.
A9 – Nosso foco precisa ser essa questão dos problemas que o robô vai identificar. Podemos pensar numa viga, por exemplo, e identificamos mais ou menos onde pode haver um processo de corrosão e o robô vai e faz um buraco de 4 cm naquele local. Mas após 4 cm já começa a pegar na estrutura metálica...
Com base em Piaget e Garcia (2011) e Aguiar Junior (2004), acreditamos que os três tipos de sugestões caracterizam sujeitos em nível trans de equilibração ou entrando nesse nível. A facilidade e a convicção com que trouxeram elementos de outros contextos ou mesmo das teorias para o ambiente aplicacional e o objeto colaborado, demonstra que havia uma totalidade consistente de esquemas. O nível trans foi provocado pelos atos solidários e formação de laços afetivos, que foram se tornando cada vez mais fortes, levando a mais assimilações e acomodações. À medida que os esquemas dos alunos se tornaram mais amplos, deram também condições para continuação da colaboração. No início as sugestões eram mais simples e, com tempo foram ficando mais elaboradas, assim como o nível de complexidade também aumentou. Ao final, todos os sujeitos sabiam exatamente o que seria o robô e como estaríamos confeccionando-o e aplicando-o à construção civil. Havia um conjunto de conhecimentos sólidos e satisfatórios, com estudantes de diferentes áreas de formação dominando conceitos de outras áreas que antes não dominavam. Esse aumento da complexidade é crescente e caracterizado pela sequência intra-inter-trans. Mesmo que nem todos tenham acomodado conceitos mais amplos, houve um grande número de assimilações destes para futuras acomodações. Com base em Piaget (1973), afirmamos que os desequilíbrios e reequilíbrios entre fatores individuais e sociais durante o processo é a própria aprendizagem colaborativa, que foi evidenciada pelo conhecimento construído coletivamente e suficiente para confeccionar o robô. Esse conhecimento se concretizou por meio da seleção, discussão e conceituação de fórmulas, materiais, funções, sensores de umidade, temperatura e resistividade elétrica, circuitos elétricos, entre outros. Os esquemas iniciais foram modificados e formaram novos esquemas a partir de operações conjuntas, tendo o respeito mútuo, a solidariedade, a humildade e a autoridade compartilhada não só como causa dessas operações, mas transformados por meio delas.
Considerações finais
Os termos colaboração e cooperação são empregados em diferentes sentidos, às vezes próximos, distantes, amplos ou restritos. O que propusemos foi um novo emprego aliado ao processo educacional e fundamentado em conceitos piagetianos, freireanos e outros autores. Com essa discussão, apresentamos a colaboração educativa e a cooperação educativa. Essa primeira foi nosso foco, que ficou exposto na pergunta inicial: como a colaboração educativa combinada com a robótica pedagógica contribui para a aprendizagem dos sujeitos? Primeiramente, alunos e professor em conjunto partiram do contexto da construção civil, cuja problemática identificada foi as obras paralisadas na cidade de Iporá, no estado de Goiás. Essas obras poderiam estar em avançado processo de corrosão eletroquímica e, portanto, comprometidas. Isso levou o grupo a mobilizar conhecimentos científicos e noções prévias individuais, que socializadas e discutidas, resultaram em conhecimentos satisfatórios para desenvolver um robô que pudesse identificar a corrosão interna em vigas e colunas de concreto. Essa construção conjunta foi possível por meio da formação de laços afetivos, atos de solidariedade, autoridade compartilhada, respeito mútuo, autonomia e relações horizontais, que não só implicaram no ajuste e modificação de esquemas individuais num único sistema operatório, mas também ocorreram em função destes. O reequilíbrio entre os fatores individuais e sociais é a própria aprendizagem colaborativa, que foi evidenciada pela construção de conhecimento e aumento do seu nível de complexidade ao longo do processo. A colaboração educativa é, portanto, um método de ensino contextualizado em que há participação ativa dos alunos e conduz à aprendizagem colaborativa. Consiste ainda em método para a pesquisa educacional por meio das três etapas (razão hierárquica, razão categórica e análise qualitativa subcategórica), que visam avaliar o processo em sua forma e conteúdo. São propostas advindas do Ensino Superior com grandes pretensões para aplicação na Educação Básica.

